X射线实时成像设备与计算机深度学习
X射线实时成像设备无损检测在孔隙率和裂纹检测方面有无可比拟的优势。由于工业生产条件的制约,工件缺陷难以避免。通常工件内部主要存在夹渣、气孔和裂纹等缺陷。这些缺陷在服役过程中不断演化,对工件的性能造成影响,最终使工件失效,缩短了工件的使用寿命,进而威胁机器的使用安全。通过工业CT无损检测技术,对工件内缺陷的形状、面积、位置了解的越清楚,对工件的可靠性评估就会越准确。
目前的X射线实时成像设备软件缺陷检测算法一般分为两个步骤:1)缺陷区域分割,将所有潜在的缺陷区域从CT图像中分割出来,并选取边界闭合的区域作为缺陷候选区域;2)候选区域判别,对分割出的候选区域依据形状特征、灰度特征以及不变矩特征进行甄别。而候选区域判别这一部分,需要人参与设计缺陷的一些主要特征,这就存在一个问题:基于手工设计的特征对于缺陷多样化的变化没有很好的鲁棒性,只适用于特定的缺陷检测,很难适应缺陷面积大小不一、形状种类多样化、背景区域复杂的图像的自动识别与定位。2006年Hinton等人第1次提出了深度学习的概念,开启了深度学习在学术界和工业界研究的新起点。深度学习相比于传统手工提取特征的方法,不仅可以自动学习到目标的特征,而且适合数据集的处理,还能进行端到端(end2end)的学习。深度学习的优势在于其能够学习到多层的非线性关系,这是其他浅层学习算法所不能做到的。2012年,Hinton和他的团队在ImageNet评测问题中采用深度学习算法将原来的图像识别错误率降低了9%。
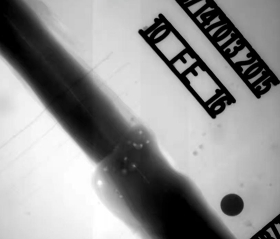
由于X射线实时成像设备系统的成像原理,重建获得的工业CT图像含有一定的噪声,对于夹渣和气泡这样的小目标缺陷,在某些区域目标和背景的灰度差异很小,这种情况下人眼也比较困难发现并识别目标,从而影响GT包围盒的标记,进一步影响模型的训练,所以有必要做预处理来增强这些较小目标和背景的灰度差异。通过深度学习和在检测之前对训练集做预处理增强目标和背景的差异,最终获得工业CT图像缺陷检测模型。利用深度卷积网络自动提取特征,有效避免了传统方法依赖手工设计缺陷特征的问题,从而更好地检测到气泡和夹渣这类面积较小的目标,降低了模型对这类缺陷的误检和漏检率。此类方法可以得到较优的检测结果,并且速度快,从检测过程上较传统方法在自动化程度上有了大幅的提升,具有较强的鲁棒特性,是一种有效可行的方法。
总之,一个好的X射线实时成像设备检测效果需要三方面的共同努力,第一:性能良好的工业CT设备,第二,经验丰富的检测工程师,第三,拥有强悍算法的计算软件。而泰琛测试一直在向这方面努力,我们引入德国全系列Yxlon设备,我们拥有多名5年以上工业CT检测的工程师,同时,我们和德国相关工业CT软件厂商深度交流合作,参与项目测试调研,不断提高系统算法和软件计算能力,总之,泰琛测试一直在整合各种资源,不遗余力地提高工业CT检测的技术水平,并愿意以此为核心能力为中国工业CT领域贡献更多的力量。

地址:辽宁省丹东市元宝区古城村向阳村民组62号
电话:+86-13804156155
传真:+86-415-3118858
网址:www.ddhlkj.com
邮箱:ddhlkj@163.com
 辽公网安备 21060302000204号
辽公网安备 21060302000204号

销售二维码,了解更多