所谓管道爬行器,用于天然气管道、石油管道、城市供排水管道、自来水管道等多种管道的缺陷检查、修补等工作。
管道机器人系统由行走机构、用于管内壁观察和检测的视觉检测装置、控制和通讯装置等组成,若需要还可以加上管内缺陷的修补装置。根据应用场合不同,该种机器人可适用于管径为219mm-850mm、420mm-2600mm或者更大的管径。该机器人采用直流电机驱动系统,驱动力巨大。可有效解决管道问题。
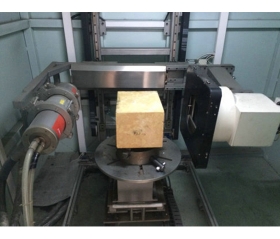
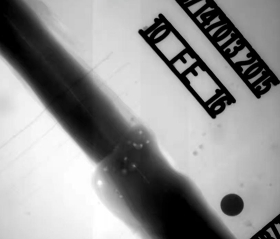
X射线管道爬行器是在管道敷设工程中对管道对接焊缝进行全向X光片拍摄的设备。用一个牵引小车将周向X射线探伤机带入管道内部,当射线机的射线发射窗口对准焊缝位置时,通过遥控,使射线机按照设定的曝光电压和曝光时间对管道对接焊缝进行曝光。由于采用周向X射线探伤机在管道内部中心曝光,焦距短、单壁投影,一次曝光即可完成整道焊口的曝光,同定向射线机 在外部双壁投影的方法相比,工作效率能够提高几十倍。爬行器在管道内部的运动,由管道外部的指令源或无线电控制箱进行控制,以完成前进、后退、停止、曝光等动作。

声明:本文仅供交流学习,版权归属原作者,部分文章推送时未能及时与原作者取得联系,若来源标注错误或侵犯到您的权益,烦请告知,我们将立即删除,谢谢!!!
地址:辽宁省丹东市元宝区古城村向阳村民组62号
电话:+86-13804156155
传真:+86-415-3118858
网址:www.ddhlkj.com
邮箱:ddhlkj@163.com
 辽公网安备 21060302000204号
辽公网安备 21060302000204号

销售二维码,了解更多